
Early Continuum Robots - The 1980s
While continuum robotics research has gained momentum in this century, looking at the beginnings and early work makes one awe struck! In research, we are familiar with the metaphor “standing on the shoulders of giants”. But as the body of work growing with unprecedented speed, it seems impossible to know all the work of others when undertaking our research - particularly the early works. In our history blog post category, we are taking the time to look at past research and seek to investigate which ideas have been thought of before and where the roots lie.
The 1980s mark the decade which lead to major developments in continuum robot designs. In today’s post, we will look at some of the major thought leaders and research works of this decade.
Shigeo Hirose, Tokio University
Shigeo Hirose is one of the pioneers in continuum robotics, who was instrumental in shaping an era of snake-like robots1. During the early 1980s, Hirose and his team developed the ELASTOR manipulator2, a cable-driven continuum robot which is composed of eight segments driven by a total of 24 wires. Each segment is composed of coil springs. The size of ELASTOR is comparable to the human arm and the intended use was for reaching and manipulating in areas hard to access.
 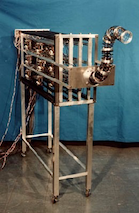 |
| ELASTOR manipulator of Hirose et al. An eight segment cable-driven continuum robot with coil springs. |
Elephant Trunks
 The elephant trunk often serves as an inspiration for continuum robots.
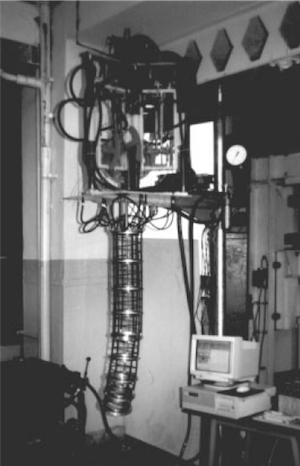
The first continuum robot inspired by the morphology of an elephant trunk was proposed by Morecki et al.3.
A publication in the late 1990s summarized the developments which originated in the late 1980s 4.
Initially, the intended use of the elephant trunk like robot was as a manipulator on a quadruped walking robot.
Later, the researchers proposed to use the elephant trunk robot for transportation of bulk and liquid materials in workspaces with obstacles through small holes.
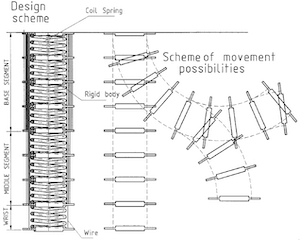
The manipulator has three segments: a base, a middle, and a shorter wrist segment.
The backbone is a coil spring and actuation is achieved by cables.
The elephant trunk often serves as an inspiration for continuum robots.
The first continuum robot inspired by the morphology of an elephant trunk was proposed by Morecki et al.3.
A publication in the late 1990s summarized the developments which originated in the late 1980s 4.
Initially, the intended use of the elephant trunk like robot was as a manipulator on a quadruped walking robot.
Later, the researchers proposed to use the elephant trunk robot for transportation of bulk and liquid materials in workspaces with obstacles through small holes.
The manipulator has three segments: a base, a middle, and a shorter wrist segment.
The backbone is a coil spring and actuation is achieved by cables.
SMA-driven Small-scale Continuum Robots
In order to achieve a smaller scale than the wire-driven design in ELASTOR, the researchers around Hirose developed microactuators based on shape-memory alloys (SMA).
Ikuta and Hirose introduced a so-called active endoscope in the 1980s5 with intended use in medical applications (endoscopy and colonoscopy).
NiTi wires are arranged in parallel, such that heating by high voltage at low current achieves actuation as the wires shorten and return to their initial length when the temperature drops.
The prototype of the active endoscope has 13 mm diameter at 215 mm length and is composed of five segments with maximum bending angle per segment of 60 degrees.
  |
| SMA-based continuum robot by Ikuta and Hirose with intended use in endoscopy. |
Soft Continuum Robots
Soft continuum robotics has been pioneered by James Wilson at Duke University in the mid 1980s.
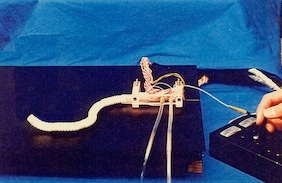
In a project on compliant robotic structures, Wilson et al. developed continuously flexible arms based on fluidic-driven actuation.
 In a series of reports to the funding agency, Wilson et al. report on fundamental findings in design, modeling, and control of soft fluid-driven continuum robots 6 7 8.
The research took inspiration from muscular hydrostats and used soft tube elements designed to bend, twist, or extend under pressurization, so called bellow structures9.
In a series of reports to the funding agency, Wilson et al. report on fundamental findings in design, modeling, and control of soft fluid-driven continuum robots 6 7 8.
The research took inspiration from muscular hydrostats and used soft tube elements designed to bend, twist, or extend under pressurization, so called bellow structures9.
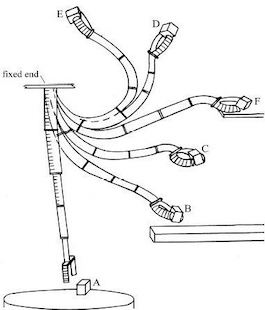
 |
| Soft continuum robot arm by Wilson et al. based on fluidic-driven bellow structures. |
References
-
S. Hirose and P. Cave, Biologically Inspired Robots: Snake-Like Locomotors and Manipulators. Oxford University Press, 1993 ↩
-
S. Hirose, T. Kado, and Y. Umetani: Tensor actuated elastic manipulator. Proc. 6th IFToMM World Congress, 1983, pages 978–981 ↩
-
A. Morecki, K. Jaworek, W. Pogorzelski, T. Zielinska, J. Fraczek, and G. Malczyk: Robotics System—Elephant Trunk Type Elastic Manipulator Combined with a Quadruped Walking Machine. Robotics and Factories of the Future, R. Radharamanan, Ed., Berlin, Heidelberg: Springer Berlin Heidelberg, 1988, pages 649–656. doi: 10.1007/978-3-64273890-6_78 ↩
-
R. Cieslak and A. Morecki: Elephant trunk type elastic manipulator - A tool for bulk and liquid materials transportation. Robotica, volume 17, number 1, pages 11–16, 1999, ISSN: 02635747. doi: 10.1017/S0263574799001009 ↩
-
K. Ikuta, M. Tsukamoto, and S. Hirose, “Shape memory alloy servo actuator system with electric resistance feedback and application for active endoscope,” in IEEE International Conference on Robotics and Automation, 1988, pages 427–430. DOI: 10.1109/ROBOT.1988.12085 ↩
-
J. F. Wilson, “Compliant Robotic Structures - Part I,” School of Engineering, Duke University, Tech. Rep., 1985, pages 1–123. ↩
-
J. F. Wilson, “Compliant Robotic Structures - Part III,” School of Engineering, Duke University, Tech. Rep., 1987, pages 1–139. ↩
-
J. F. Wilson, “Compliant Robotic Structures - Part II,” School of Engineering, Duke University, Tech. Rep., 1986, pages 1–140. ↩
-
J. F. Wilson, “Mechanics of bellows: A critical survey,” International Journal of Mechanical Sciences, volume 26, number 11-12, pages 593–605, 1984. DOI: 10.1016/0020-7403(84)90013-4 ↩