
The First Continuum Robot
The very first continuum robot was developed by two students at Stanford University in 1965, Victor Scheinman and Larry Leifer. Named after the Norwegian term for snake, the Orm is a pneumatically actuated robot arm. Motion is achieved by a total 28 inflatable pneumatic bellow actuators sandwiched between seven metal disks. Each actuator could be fully inflated or deflated by setting or resetting a bit in a computer word. The design was abandoned because the robot’s motion was diffcult to control at that time.
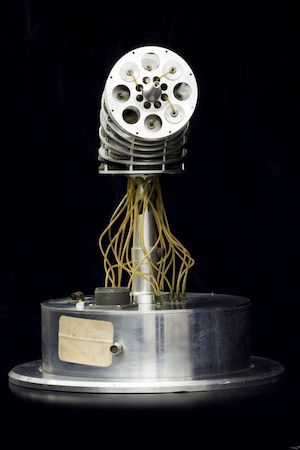 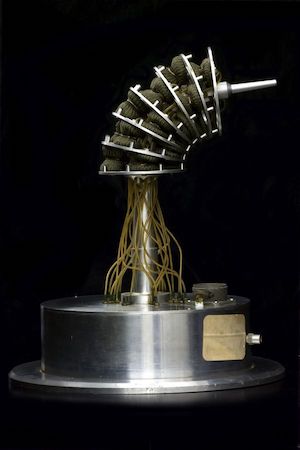 |
| Photographs © Mark Richards source |
According to the definition of a continuum robot, the Orm is strictly speaking not a continuum robot, but a redundant robot as the seven disks are connected via ball joints. Yet, the Orm is considered as one of the first quasi-continuous robots! Today, the Orm is displayed in the Computer History Museum in Mountain View, California, USA.
Did you know? Victor Scheinman is not only the inventor of the very first continuum robot! More importantly, he is one of the pioneers in robotics as he invented the Stanford arm in 1969 and was involved in the design of the MIT arm.