
A Short History on Concentric Tube Continuum Robots
The continuum robotics community usually refers to two papers when it comes to acknowledging the first appearance of concentric tube continuum robots. They both appeared at the same conference, IEEE International Conference on Intelligent Robots and Systems (IROS), the same year (2006), presented in the same session, one after the other, from two different author groups: (1) P. Sears and P. Dupont1 and (2) R.J. Webster III, A. Okamura, and N.J. Cowan2. (Note: ordered alhpabetically by first author)
Sears & Dupont refer to the idea as
a steerable needle technology using curved concentric tubes1
and Webster, Okamura & Cowan refer to the idea as
continuously flexible snake-like robots, called active cannulas, that consist of several telescoping pre-curved superelastic tubes2
What is less known, is the fact that the concept of a robotic device using concentric precurved tubes was already introduced one year earlier, in 2005, by Furusho et al.3 at the IEEE International Conference on Mechatronics & Automation. They provide a conceptual drawing of what they call a
curved multi-tube catheter3
consisting of an outer and inner guide, both precurved elastic tubes, and a third innermost tube/needle. Furusho et al. state the kinematics of this robotic device and present a motorized prototype that they teleoperated.
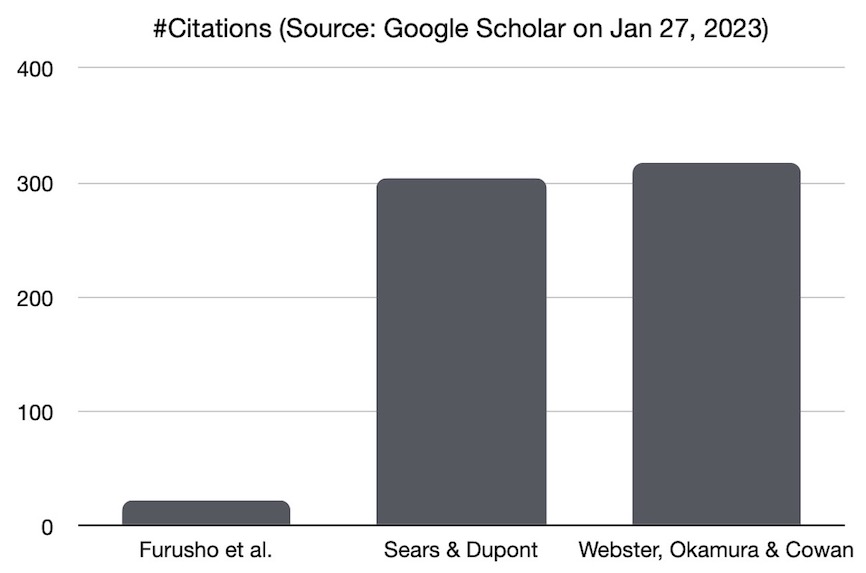
This is not to say that Furusho et al. was not recognized. Their work has been acknowledged, but just not as much. The number of citations (obtained from Google Scholar on Jan 27, 2023) show a quite drastic difference. It is hard to tell, and would be pure speculation, why the two papers from IROS 2006 are more often cited than Furusho et al. And yet, as we are all standing on the shoulders of giants in academia, we should not forget those who paved the way and published innovative ideas first.
In his PhD thesis, available open-access here, Hunter Gilbert provides a thorough comprehensive historical perspective on the origin of curved mutli-tube medical tools and how those relate to concentric tube continuum robots in Section 1.1. This section is also part of Gilbert, Rucker & Webster4 review paper on concentric tube continuum robots.
References
-
P. Sears & P. Dupont: A Steerable Needle Technology Using Curved Concentric Tubes. IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2850-2856, 2006. doi: 10.1109/IROS.2006.282072 ↩ ↩2
-
R. J. Webster, A. M. Okamura, N. J. Cowan: Toward Active Cannulas: Miniature Snake-Like Surgical Robots. IEEE/RSJ International Conference on Intelligent Robots and Systems, pp. 2857-2863, 2006. doi: 10.1109/IROS.2006.282073. ↩ ↩2
-
J. Furusho, T. Ono, R. Murai, T. Fujimoto, Y. Chiba, H. Horio: Development of a curved multi-tube (CMT) catheter for percutaneous umbilical blood sampling and control methods of CMT catheters for solid organs. IEEE International Conference Mechatronics and Automation, pp. 410-415, 2005. doi: 10.1109/ICMA.2005.1626582 ↩ ↩2
-
H.B. Gilbert, D.C. Rucker, R.J. Webster III: Concentric Tube Robots: The State of the Art and Future Directions. International Symposium on Robotics Research, pp. 253–269, 2016. https://doi.org/10.1007/978-3-319-28872-7_15. ↩